Essence of linear algebra
07 Apr 2018前言
以下内容启发自著名youtuber-3b1b的线代教程。不涉及到具体计算方法,只对线代的基本几何意义进行总结。
1 线性
- 线性相关:a可用b(可能由多个线性无关的向量组成)表示出来
- 线性变换:向量空间的线性函数变换,其中的空间变换关系就是矩阵,矩阵中的具体数值可看作原基向量通过这种变换后的坐标位置
- 矩阵的行列式的绝对值含义为线性变换使空间压缩或放大的比例,如果行列式为负,则表示将空间翻转了,空间定向(orientation)改变了。特征就是本来在单位向量i左边的j,转到了i右边。
- 转置不改变行列式的值。
- 行列式为0,代表着原空间维度的损失。
2 秩与线性方程组
- 一个矩阵将原空间的线性变化后,该矩阵的秩就是变换后空间的维度。
- 求解线性方程组$Ax=v$的答案 $x$($x=A^{-1}v$),x和v是被矩阵A线性变换前后的向量,所以求解x就是将v反向变换回来的操作,所以$A^{-1}A=I$。
- 如果线性方程组中的$A$不存在逆矩阵(即其不满秩),那只有$v$在$A$将原空间线性变换后的空间上时,$x$才能有解。
- 满秩矩阵才存在逆矩阵,逆矩阵就是原矩阵进行的空间线性变换的反向操作;也就是说,如果矩阵将空间变换后的维度降低了,那就不存在某种逆变换能够将空间还原。
- 满秩意味着秩与列数相等;若方阵$A$的$R(A)=n$,称$A$为满秩矩阵(可逆矩阵,非奇异矩阵)。
- 求解线性方程组$Ax=0$的答案,从几何的角度来考虑,$A$将原空间维度降低了,找到原空间中的某个向量$x$,$x$必须和变换后的新空间垂直。
- 矩阵的列是原空间基向量变换后的位置;矩阵的 列空间 是矩阵在将空间线性变换后,所有通过原点的向量的集合共同张成的空间,也就是矩阵的列所张成的空间。
- 对于方阵有:非奇异矩阵 = 满秩矩阵 =可逆矩阵,奇异矩阵 = 降秩矩阵。
3 核Kernel
- 通过矩阵的变换后落在原点的向量的集合(该过程伴随着维度降低,即矩阵不满秩),被称作矩阵的“零空间”(Null space)或“核”(Kernel);
- 向量集合张成的空间就是“零空间”,“零空间”和矩阵变换后的空间相互垂直。
- 线性方程组$Ax=0$(0向量)的解$x$,就是零空间。
4 非方阵
- 行m > 列n 的非方阵,表达的变换,是将输入空间的n个基向量变换到高维(m)空间中的一部分(一个n维空间)表示出来。
- 例子1. m=3,n=2 是将原2维平面空间变换到3维空间中的某个平面上。
- 该矩阵依然满秩,因为列空间的维度和输入空间的维度相等,原输入空间二维,经过矩阵变换输出后,空间依然二维!
- 例子1. m=2,n=3 是将原3维空间压缩到2维空间(试想象在该矩阵右边乘上一个3x1的向量)。
- 该矩阵不满秩(可能行满秩),因为列空间的维度 2 小于输入空间的维度 3。
- 例子1. m=3,n=2 是将原2维平面空间变换到3维空间中的某个平面上。
Q:$R(A)\leq min(m,n)$? 2x3的矩阵就是不(列)满秩的?意味着空间变换的时候有维度的损失?自问自答:yes,yes,yes.
5 点积(内积)与对偶
对偶性:两种数学事物之间自然而又出乎意料的对应关系。
你可以说一个向量的对偶是其定义的线性变换;一个多维空间到1维空间的线性变换的对偶是多维空间的某个特定向量。
- 下列两个矩阵的空间变换效果相同,都是垂直拍平2维空间,去掉一个维度:
- 将向量看作一种线性变换(矩阵)。1x2矩阵就是一种将二维空间变换为一维数轴的过程,该过程可以看做将2维空间的向量线性变换为一维空间的数值:
- 两个向量的点积是其中一个向量(任意)在另一向量上的投影的长度与被投影向量的长度乘积:
1x2矩阵和二维向量相乘的计算过程 和 其相应的转置矩阵求点积的计算过程相同,这个点积的投影过程就是矩阵的线性变换映射的过程
6 叉积(外积)
- 两个向量的叉积只能定义在3维空间内。
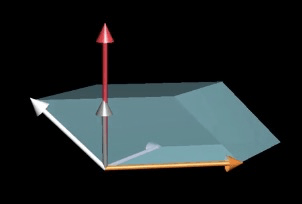
- 叉积:两个向量 $\vec v,\vec w$ 的叉积是一个向量,该向量垂直于a和b所在的平面,方向由右手法则确定。向量的长度为a和b围成的平行四边形的面积。
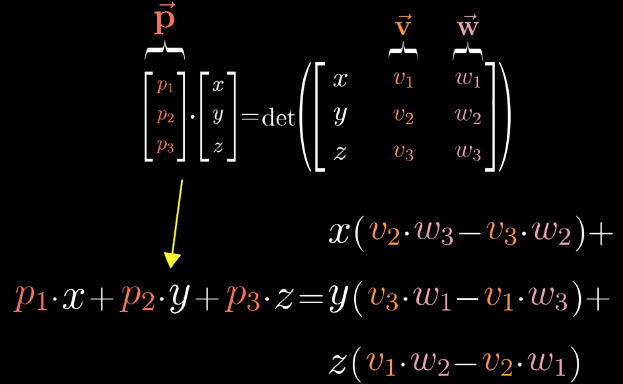
引入一不确定的向量$\vec a=\begin{bmatrix}x&y&z\end{bmatrix}^T$和 $\vec v,\vec w$ 一起组成矩阵$\begin{bmatrix}\vec a&\vec v&\vec w\end{bmatrix}^T$并计算其行列式。行列式的值就是三个向量围成的平行六面体的体积。此时寻找一个$\vec p$使得:
上式左侧是3维空间里两个向量的点积,可看做$\vec a$投影在$\vec p$上的长度乘以$\vec p$的长度。式子等号若要成立,可看作以$\vec v,\vec w$围成的平行四边形为底,为其寻找一个垂直于该四边形平面的向量$\vec p$,该向量的长度等于平行四边形的面积:
7 基变换
- 基向量是空间内一组用来描述向量的作为单位的向量。在我们当前的视角下基向量一般都是选用相互垂直的单位向量$I$。
- 若在某基向量$X$(也是基于我们当前视角下的基向量$I$描述出来的$X$)下描述的一向量${\vec a}^x$想转化为我们的视角下的向量${\vec a}^{I}$,可以利用下述公式进行转换:
注意:${\vec a}$是客观存在的一不需要用基来描述的向量;在基向量$X$下描述出的向量 ${\vec a}$ 是 ${\vec a}^{X}$,其本质是在$X$视角下的对基向量的选用方式,并且$X$矩阵中的具体数值是用我们当前的视角($I$)描述出的。所以上式左边的向量就是我们当前视角下的向量${\vec a}^I$
-
如果我们想把当前视角下的${\vec a}^I$转化为基向量$X$视角下的向量(${\vec a}^X$)来表示出来,可以用如下方法:
-
将我们当前基向量$I$视角下的某种变换$A^I$用另一种基向量视角$X$来表述出来: $A^X=X^{-1}A^IX$。如果当前基向量视角下有某个向量${\vec a}^I$进行矩阵$A^I$的变换,然后用基向量$X$描述出来:
所以,通常表达式$X^{-1}A^IX$暗示着一种数学上的转移作用,即视角上的转化
8 特征向量和特征值
-
特征向量:在经过矩阵的变换后,仍处于自己张成的空间内的向量。也就是矩阵的变换沿着特征向量的方向进行。
-
特征值:矩阵变换将特征向量放缩的倍数。
- $\lambda$和$\vec v$分别为矩阵$A$的特征值和特征向量,矩阵对空间内某个向量的变换,等价于该向量方向不变的放缩。
- 求解方式是$det(A-\lambda I)\vec v=\vec 0$,即求$det(A-\lambda I)=0$。因为当且仅当矩阵代表的变换将空间压缩到更低的维度时(行列式为0),才会存在一个非零向量,使得矩阵和它的乘积为零向量。
-
有些矩阵没有特征向量,比如旋转矩阵$\begin{bmatrix}1&-1\1&1\end{bmatrix}$,所有原空间内的向量都离开了自己张成的空间(计算得出的特征值有复数,一般特征值为复数对应于变换中的某种旋转);有些矩阵有无数个特征向量,比如放大矩阵\(\begin{bmatrix}2&0\0&2\end{bmatrix}\),其只有一个特征值2。
-
对角矩阵:除了对角线上有非0值,其余位置数值全部为0。解读这种矩阵的方法是,所有基向量都是特征向量,对角线上的数值是对应特征向量的特征值(即可以理解为对角阵的特征值为对角元,特征向量组成的基为$I$);所以对角矩阵与自身相乘$n$次的效果,就是将每个特征向量放大${\lambda}^n$倍,${\lambda}$为其对应的特征向量。
-
用特征向量来作为基向量,转化原空间内的一种矩阵变换为新的基向量视角下的矩阵变换:
上式($A^{-1}XA=D$)右边得出的矩阵变换,每列为特征向量,对角线数值为每个特征向量对应的特征值,可称这种特征向量构成的基向量组成的集合为“特征基”(eigenbasis)。
-
上诉变换过程为“对角化”,并非所有矩阵都能对角化,只有特征基能够张成整个空间才行,即特征向量个数达到整个空间的维度。
-
如果想求原始矩阵变换的100次幂,可现将其转变为用特征基来表示,然后在特征基的坐标系中计算其100次幂,然后再转换回原基表示。即$AD^{100}A^{-1}=X^{100}$。
9 抽象向量空间
普适的代价是抽象。
-
行列式和特征向量与所选坐标系无关,行列式表示的是变换对面积的缩放比例,特征向量是在变换中留在它所张成的空间中的向量。
-
微分算子$\frac{d}{dx}$是线性的,求导是线性运算。
-
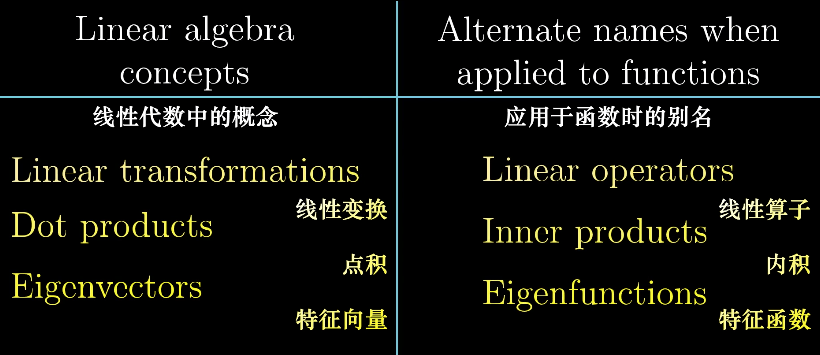
关于向量的概念在函数的世界都有直接的类比:
-
只要处理的对象集具有合理的数乘和相加的概念,线性代数中所有关于向量、线性变换和其他的概念(线性变换、零空间、特征向量、点积等)都适用于它;这些类似向量的事物,如箭头、一组数、函数等,构成的集合被称作“向量空间”:

-
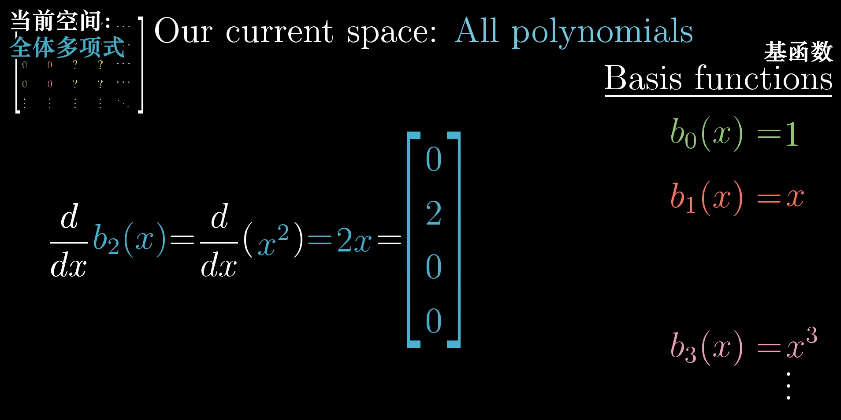
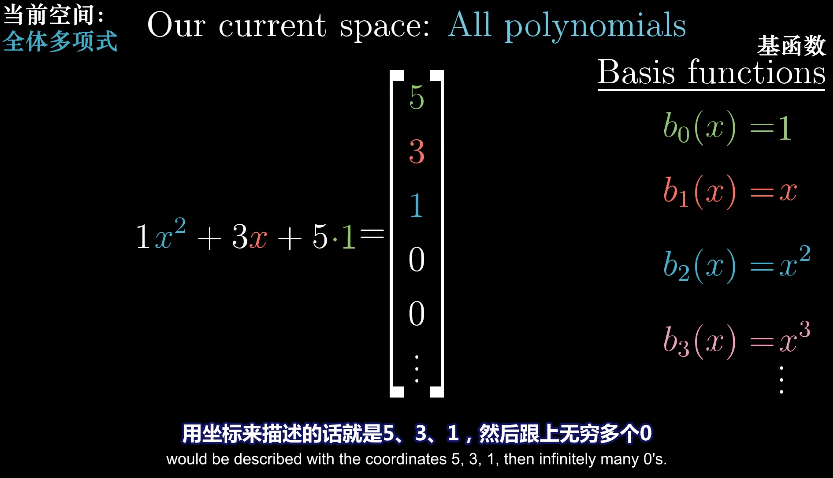
对于向量空间内的函数来说,微分算子$\frac{d}{dx}$就是一种线性变换。更具体地,对于函数中的全体多项式空间来说,基向量此时就是基函数:
此时求导这种线性变换(微分算子$\frac{d}{dx}$满足线性性质)就可以用一个无限阶矩阵描述:
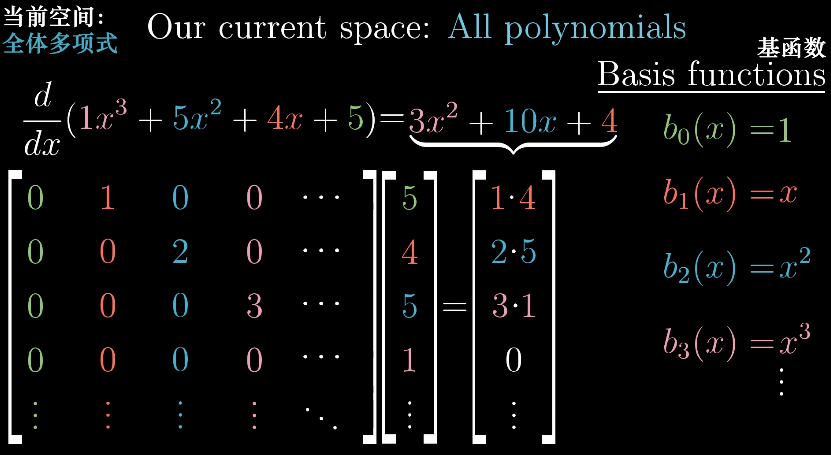
其中微分矩阵的计算方法是,对每个基函数进行微分变换得出微分后的基函数,将所有基函数组合在一起就是相应的整体微分变换矩阵: